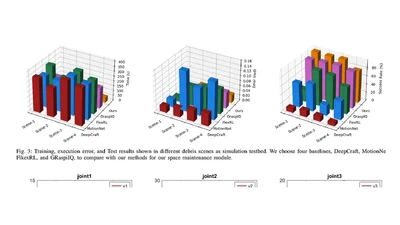
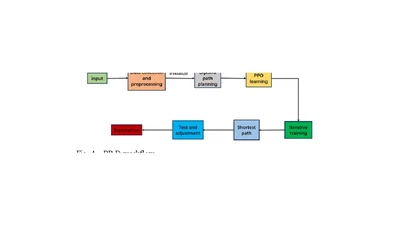
DK-RRT: Deep Koopman RRT for Collision-Aware Motion Planning of Space Manipulators in Dynamic Debris Environments
Deep Koopman RRT for collision-aware space manipulator planning.
q.-chen
Deep Koopman RRT for collision-aware space manipulator planning.
Machine learning for efficient picking and packing in automated warehouse robot systems.
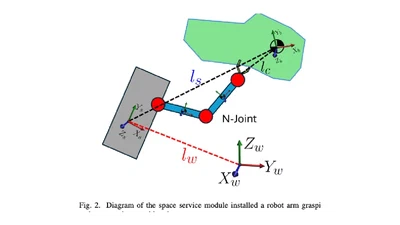
Deep adaptive control for aerospace robotic manipulators.
Reinforcement learning for warehouse robot navigation in complex layouts.

Deep reinforcement learning for obstacle avoidance in warehouse robotics.