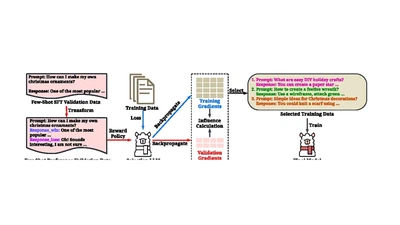
ROSE: A Reward-Oriented Data Selection Framework for LLM Task-Specific Instruction Tuning
Reward-oriented data selection for task-specific LLM instruction tuning.
y.-wu
Reward-oriented data selection for task-specific LLM instruction tuning.
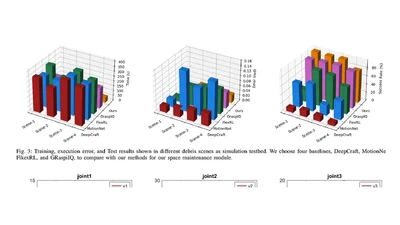
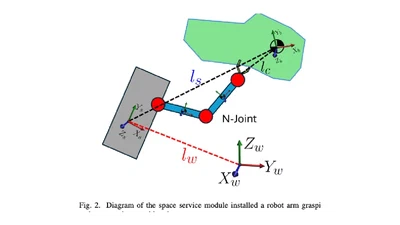
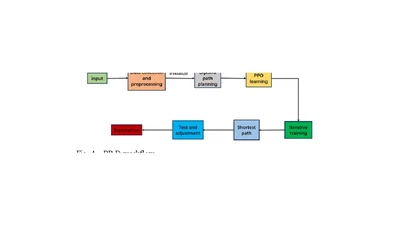
Deep Koopman RRT for collision-aware space manipulator planning.
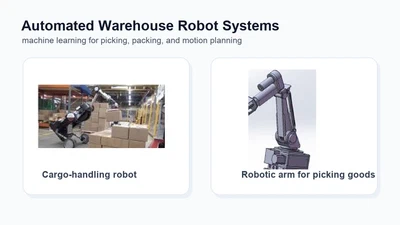
Machine learning for efficient picking and packing in automated warehouse robot systems.
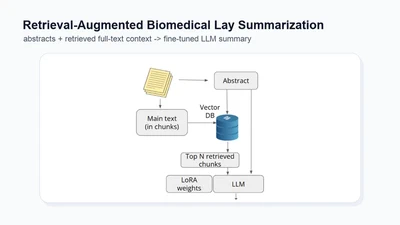
Retrieval-augmented fine-tuning for biomedical lay summarization.
Deep adaptive control for aerospace robotic manipulators.
Reinforcement learning for warehouse robot navigation in complex layouts.
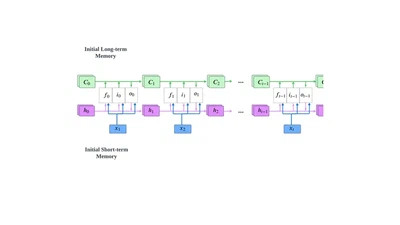
LSTM modeling for 30-day hospital readmission prediction.

Deep reinforcement learning for obstacle avoidance in warehouse robotics.